One of the first changes we made, and one of the only changes made to
O'Blue, was the gears. The
RepRap directions indicate that you file two sides of the motor shafts to fit the drive gears on them.
our new gear (left), stock gear (right)
This was determined to not be the best solution when we could just make new gears. There are several modified gears on Thingiverse, but I developed a
OpenSCAD script that allows you to import a STL file and specify the new hole size (and shape) and it plugs the old hole and cuts a new one. This also allowed us to make a new gear for
Wade's Extruder (as his had too large a hole for our motors).
The other changed gears where the Z-lead screw gears. It was determined that the ones with
combined rims were going to be better.
The next change that was made was to use
Vik's Footed Vertex for the bottom four vertexes. This eliminates a problem of the vertical drive shafts being the lowest point on the Mendel. Since we discovered this problem after assembling most of the frame on
O'Blue we ended up making
add on feet for that Mendel.
Then another area of concern that I mentioned last time was the Z belt tensioner. Four options were evaluated as follows:
Option 1. Use all stock parts and modify the tensioner
Option 2. Same as one but combine the tensioner with one lead-screw base and the motor mount with the other. This eliminates two threaded rods.
Option 3. Eliminate the tensioner altogether and make the motor slide to adjust the tension. This also eliminates two rods.
Option 4. Basically the same as Option 2 but allows the motor to adjust as well.
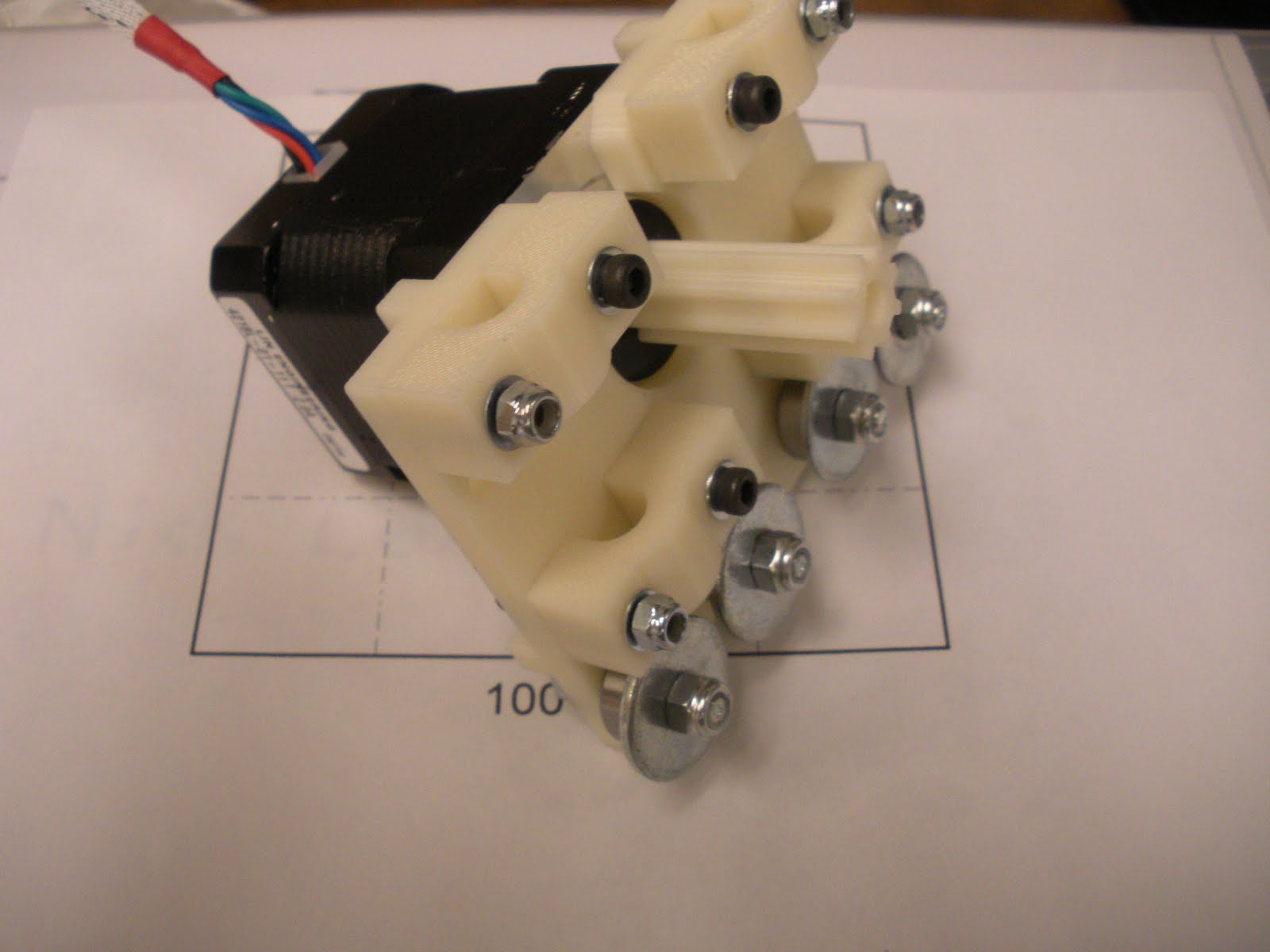
After evaluating these options it was decided that we would use option 3. The new part looks like this (the other lead-screw base is basically stock):
This is based on the OpenSCAD version of the
lead-screw base by Vik. The one issue we have discovered is the hole for the opto-stop trapped nut is larger than the nuts we have so they spin freely. Not a huge problem as we were able to jam the tip of a pair of needle-nose pliers in to hold the nut. But it is something I will likely adjust before uploading my derivative work to Thingiverse.
This saved 2 rods and one RP part. It also meant we would need a slightly shorter belt. So we were going to order 35" belts, however they only had one so we ordered one 35" and one 36". I will let you know later (when we have installed them) what length is best.
We then evaluated the hardware that was consumed in assembling
O'Blue and modified the hardware list to minimize some waste. Once again I plan to provide a optimized sourcing list in a later post once we have verified the changes we made work correctly.
Next time we start building....
Now to leave you with some pictures of the new parts...
As I noted before mostly printed on the uPrint (in natural ABS) with a few parts from the 768BST (in blue ABS).